
Introduktion
Одной из основных целей любого государства является обеспечение доступной, надежной и устойчивой электрической энергией. Главное препятствие к этому связано с тем фактом, что энергоснабжающие организации не всегда обладают всеобъемлющей картой воздушных линий электропередач, а схемы, которые существуют, как правило, устарели и неполны. Без централизованной карты, правительства или другие организации не обладают знаниями для принятия обоснованных решений об инвестировании средств в техническое обслуживание или расширение электрической сети. Этот недостаток информации также усложняет принятие решений об установке альтернативных источников энергии – не зная, где обычная сеть, трудно разумно использовать альтернативы, такие как солнечная или ветровая энергия. Помимо самой карты, правительства и организации нуждаются в быстром и экономически эффективном инструменте. Высоковольтная сеть постоянно расширяется, поэтому важным моментом является возможность создания точных снимков через равные промежутки времени. Функционал платформы cGIS включает алгоритм, способный эффективно картировать инфраструктуру воздушных линий электропередач.
Denna funktion ger en automatisk lösning på problemet med att upptäcka kraftledningar med hjälp av maskininlärning. Lösningen är en algoritm som tar emot fjärranalysdata som indata. De resulterande bilderna bearbetas i det synliga spektrumet av ett neuralt nätverk och returnerar geografiska platser som med stor sannolikhet innehåller delar av högspänningsinfrastruktur - kraftledningsstolpar. Dessa uppgifter måste dessutom verifieras av operatören. Även i sin ursprungliga form klassificeras de dock som geografiska positioner som med stor sannolikhet motsvarar platser för verkliga objekt i områdena.

Klassificering eller upptäckt?
Den första frågan för att skapa en sådan lösning var att fastställa själva uppgiften för maskininlärning. Vi inspirerades inledningsvis av hur DevSeed löste ett liknande problem. Deras lösning omfattar klassificering av vektorplattor, på en karta i skala 1:2000, som anger om det finns kraftledningsstolpar på en viss platta. Operatören måste sedan manuellt spåra kraftledningar på de klassificerade rutorna med hjälp av ett webbgränssnitt med en interaktiv karta.
Denna metod för identifiering av luftledningar har visat sig vara otillräckligt effektiv. Vi bestämde oss för att hitta en bättre lösning på detta problem, nämligen att direkt upptäcka själva kraftledningsstolparna på kartan.
Vi bestämde oss för att använda upptäckt i stället för klassificering eftersom upptäcktsalgoritmen har samma nackdelar som klassificeringsalgoritmen.
Fördelar:
Nackdelar:
Rådata för maskininlärning
Indata för utbildningsuppgiften är de geografiska koordinaterna för kraftledningsstolpar som kategoriseras enligt följande meningsfulla attribut: stolptyp, produktmaterial, spänningar och andra. Sammanlagt 211725 objekt fanns representerade i den fullständiga datamängden. Det fortsatta arbetet utfördes med data grupperade efter stödtyp som den mest representativa egenskapen. Nedan följer en sammanfattning av uppgifterna enligt detta kriterium.
| Typ | Antal objekt |
| Stolpar i armerad betong för överföringsledningar upp till 20 kV | 119383 |
| Stöd för överföringsledningar i trä upp till 20 kV | 83453 |
| Mellanliggande stolpar för 110 kV-överföringsledningar | 4938 |
| 110 kV förankrade stolpar | 1176 |
| Mellanliggande stolpar upp till 330 kV | 808 |
| Metallstolpar upp till 20 kV | 604 |
| Tieboltar upp till 330 kV | 265 |
| Mellanliggande stolpar för kraftöverföringsledningar 35 kV | 175 |
| 220 kV 220 kV mellanliggande torn | 96 |
| Understationer och portaler för luftledningar på 110-330 kV | 39 |
| Förankrade stolpar för 35 kV-överföringsledningar | 31 |
| Maststolpar, vägstolpar | 12 |
| 110 kV OL och portaler för understationer | 9 |
| Ankarstolpar för 220 kV-överföringsledningar | 8 |
| Spännvidder | 2 |
| 35 kV OL- och PL-portaler | 2 |
| Luftburna buntkablar | 1 |
| TOTALT | 211725 |
På grund av bristen på särskiljbarhet av alla typer av objekt på bilderna valdes följande objekt ut för vidare arbete med algoritmen för maskininlärning:
| Typ | Antal objekt |
| Mellanliggande stolpar upp till 330 kV | 808 |
| 220 kV 220 kV mellanliggande torn | 96 |
| Mellanliggande stolpar för 110 kV-överföringsledningar | 4938 |
| Tieboltar upp till 330 kV | 265 |
| Ankarstolpar för 220 kV-överföringsledningar | 8 |
| 110 kV förankrade stolpar | 1176 |
| TOTALT | 7291 |
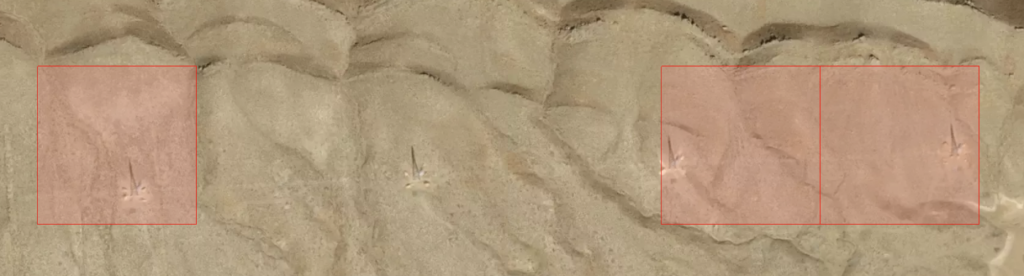
Data för maskininlärning var en rasterbild med 512x512 pixlar där högspänningsledningstornens områden var markerade. Markeringen var ett rektangulärt område i bilden som motsvarar ett genomsnittligt område på 70x70 meter på marken.
För maskininlärning delades de ursprungliga rasterbilderna upp med 80 % data för träning och 20 % data för testning.
Val av lösningsarkitektur
För uppgiften att upptäcka objekt i en bild där objekt av målklassen endast utgör en liten del av bilden är det ett problem att de delar av bilden där målobjektet saknas bidrar för mycket till träningsprocessen, vilket i slutändan leder till många luckor i testuppsättningen. För att lösa detta problem använde vi den neurala nätverksfunktionen Focal Loss, som minskar inflytandet av frekventa bakgrunder och ökar betydelsen av sällsynta objekt i träningen.
Därför valdes följande neurala nätverksarkitektur för detektion - RetinaNet, som endast använder Focal Loss som förlustfunktion.
Under RetinaNet-utbildningen beräknas förlustfunktionen för alla tänkbara orienteringar av kandidatområden (ankare), från alla nivåer av bildskalning. Totalt finns det cirka 100 000 områden för en bild. Det fokala förlustvärdet beräknas som summan av funktionsvärdena för alla ankare, normaliserat med antalet ankare som innehåller de sökta objekten. Normaliseringen görs endast av dem och inte av det totala antalet, eftersom de allra flesta ankare är lättdefinierade bakgrunder med litet bidrag till den totala förlustfunktionen.
RetinaNet består strukturellt sett av Backbone och två ytterligare nätverk (Classification Subnet) och Object Boundary Definition (Box Regression Subnet).
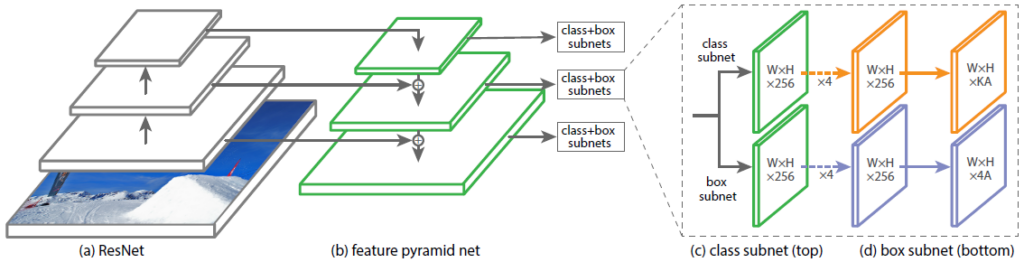
Det så kallade Feature Pyramid Network (FPN), som fungerar ovanpå ett av de vanligaste konvolutionella neurala nätverken (t.ex. ResNet-50), används som basneuralt nätverk. FPN har ytterligare laterala utgångar från de dolda lagren i det konvolutionella nätverket som bildar pyramidnivåer med olika skalor. Varje nivå kompletteras med "kunskap ovanifrån", dvs. information från de högre nivåerna, som är mindre i storlek men innehåller information om områden i det större området. Det ser ut som en artificiell utvidgning (t.ex. genom enkel upprepning av element) av mer "kollapsade" funktionskartor till storleken på den aktuella kartan, deras summering element för element och överföring både till lägre nivåer i pyramiden och ingång till andra delnät (dvs. till delnätet för klassificering och delnätet för boxregression). Detta gör det möjligt att från den ursprungliga bilden extrahera en pyramid av egenskaper i olika skalor, på vilken både stora och små objekt kan upptäckas. FPN används i många arkitekturer som förbättrar upptäckten av objekt i olika skalor - RPN, DeepMask, Fast R-CNN, Mask R-CNN och andra.
I vårt nät, liksom i det ursprungliga, används FPN med fem nivåer från P3 till P7. Nivån Pl har en upplösning som är 2l gånger mindre än den ingående bilden. Alla nivåer i pyramiden har samma antal kanaler C = 256 och samma antal ankare.
Förankringarnas områden valdes enligt följande: [16 x 16] till [256 x 256] för varje pyramidnivå från P3 till P7, med ett förskjutningssteg (steg) på [8 - 128] pixlar. Denna storlek gör det möjligt att analysera små objekt och vissa omgivande områden. I vårt fall är det kraftledningsstolpar med omgivande skuggor.
Utbildning och resultat
Resultaten av maskininlärning utvärderades på följande sätt: